
I have been working with satellite images for about 20 years to map and monitor the environment. In the past five years I’ve branched into working with drones for the same purpose, but with greater detail. Over this time, the advances that I’ve seen in drone technology for mapping have been phenomenal. This ranges from the software used to plan missions, through to platform capability in terms of flight time and payload capacity, and of course the camera and sensor systems able to capture the data that I am seeking.
When I first started flying drones, I never imagined that I would soon be teaching thousands of school children around the country to do the same! Now I’m on a mission to show just how cool geospatial technology is to as many people who will listen. And this starts with the very youngest students in our schools.
My drone day teaser program (see www.shemaps.com) introduces students and their teachers to drone technology through a scenario based on ‘a day in the life of a geospatial scientist’. Students learn the basics of safety, flight, and mission planning using minidrones – all within a school gymnasium. But most schools instantly want more. They want to step up to using a ‘real’ drone to map a ‘real’ environment. So I’ve been investigating the next steps for budget conscious schools.
When I first started flying drones, I never imagined that I would soon be teaching thousands of school children around the country to do the same! Now I’m on a mission to show just how cool geospatial technology is to as many people who will listen. And this starts with the very youngest students in our schools.
My drone day teaser program (see www.shemaps.com) introduces students and their teachers to drone technology through a scenario based on ‘a day in the life of a geospatial scientist’. Students learn the basics of safety, flight, and mission planning using minidrones – all within a school gymnasium. But most schools instantly want more. They want to step up to using a ‘real’ drone to map a ‘real’ environment. So I’ve been investigating the next steps for budget conscious schools.
 Students at Emerald State School learn the basics of coding their drones for an aerial survey mission |  The drone is capturing photos as it flies according to the students' plans |
Many drones are now capable of performing basic mapping functions. Here I have focused on investigating the DJI Spark, as it is the smallest (and cheapest) drone within the popular DJI range that has an onboard GNSS (Global Navigation Satellite System). As an aside, most people refer to this as GPS, however it also includes GLONASS – the Russian satellite navigation system – among others.
Back to my question – can the Spark be used for mapping? I’d have to say a little bit of yes with a whole lot of ‘but…’
Firstly I guess it’s probably useful to define ‘mapping’. I'm not going to go all purist here, but instead look at mapping in its most basic form - being able to collect data (photos in this case) that can be used to determine and analyse the location of features, patterns, or processes in the environment.
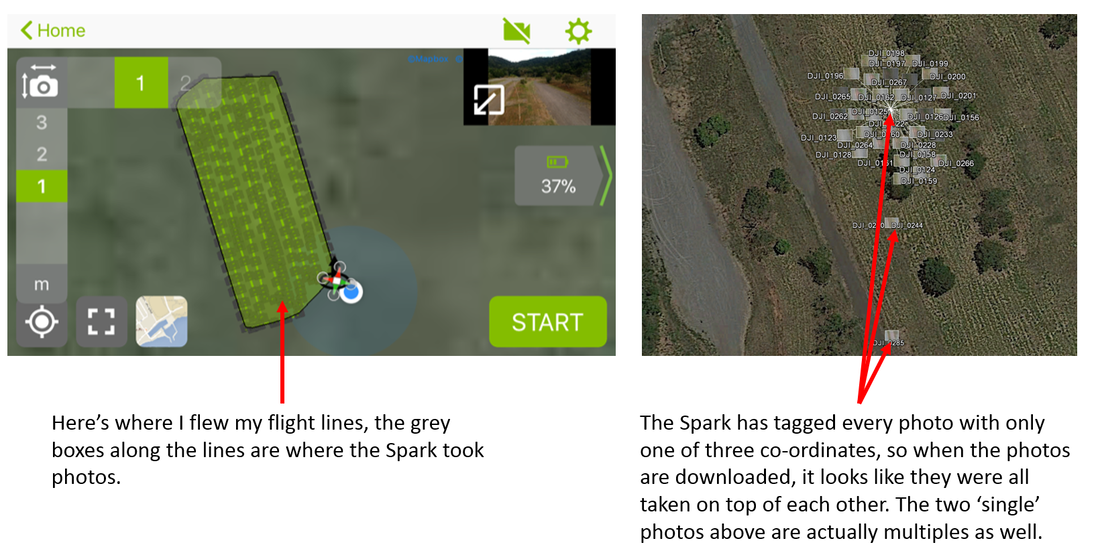
Here’s the thing. The Spark is a great option for schools wanting to take the step up from mini drones. It’s small, easy to fly, and has a reasonable camera (12MP) for the price point. But the huge downside is that it hasn’t been integrated into the commonly used mapping mission planning apps! So you simply cannot plan a gridded aerial survey mission to be flown autonomously. Pix4D capture was the only mapping app that would even recognize my Spark, yet it’s not possible to set any critical parameters such as overlap or even flying height. It can be set to take a photo at a given distance interval, but from then on, the pilot has to manually fly the mission. Perhaps this is not too bad for students to be practicing their manual flight, though it is difficult to maintain consistent speed and overlap.
Despite the challenge of manually flying straight lines as my first workaround, I managed to cover my trial survey area and capture enough photos to create an orthomosaic. But here is where I ran into perhaps my bigger challenge. The geotags on the photos are imprecise.
What does this actually mean? Let’s not be confused by accuracy – that’s a separate matter. Precision in this instance relates to the number of decimal points contained within the geotag or locational information. Imagine this – if someone asks where Australia is located, you could say ‘the southern hemisphere’, and that would be accurate. But it’s not precise enough to pinpoint its exact location. The same goes for the Spark coordinates. They are precise to four decimal places, but that’s not enough to separate them out from each other, so effectively it looks like all photos have been taken at the same spot.
Back to my question – can the Spark be used for mapping? I’d have to say a little bit of yes with a whole lot of ‘but…’
Firstly I guess it’s probably useful to define ‘mapping’. I'm not going to go all purist here, but instead look at mapping in its most basic form - being able to collect data (photos in this case) that can be used to determine and analyse the location of features, patterns, or processes in the environment.
Here’s the thing. The Spark is a great option for schools wanting to take the step up from mini drones. It’s small, easy to fly, and has a reasonable camera (12MP) for the price point. But the huge downside is that it hasn’t been integrated into the commonly used mapping mission planning apps! So you simply cannot plan a gridded aerial survey mission to be flown autonomously. Pix4D capture was the only mapping app that would even recognize my Spark, yet it’s not possible to set any critical parameters such as overlap or even flying height. It can be set to take a photo at a given distance interval, but from then on, the pilot has to manually fly the mission. Perhaps this is not too bad for students to be practicing their manual flight, though it is difficult to maintain consistent speed and overlap.
Despite the challenge of manually flying straight lines as my first workaround, I managed to cover my trial survey area and capture enough photos to create an orthomosaic. But here is where I ran into perhaps my bigger challenge. The geotags on the photos are imprecise.
What does this actually mean? Let’s not be confused by accuracy – that’s a separate matter. Precision in this instance relates to the number of decimal points contained within the geotag or locational information. Imagine this – if someone asks where Australia is located, you could say ‘the southern hemisphere’, and that would be accurate. But it’s not precise enough to pinpoint its exact location. The same goes for the Spark coordinates. They are precise to four decimal places, but that’s not enough to separate them out from each other, so effectively it looks like all photos have been taken at the same spot.
The impact of this is that software packages designed to create orthomosaics from drone data will get very confused when trying to spatially locate the input data. Incidentally, I don’t think that it’s a problem with the onboard GPS, just in the way the coordinates are recorded within the EXIF file associated with the image. So presumably it could be fixed with a software update if DJI so desired.
Luckily there is another workaround (we’re up to number two now). You can actually tell the software to ignore ALL coordinates. It will then create an orthomosaic purely on determining photo overlaps – this gives a better result than having imprecise locations. BUT the output file will not have any geographic coordinates, that is, it won’t know where it is located on the surface of the earth.
Cue workaround number three – you now need to bring the orthomosaic into a GIS software package and georeference it according to another base data set.
So, technically yes, it is possible to use the Spark for mapping, but it’s really not that convenient! And I suspect that if you are buying the Spark as a beginner drone, then these workarounds may not be in your portfolio of skills :)
Perhaps you think that your area of interest (perhaps your school grounds) is small enough to fit within a single photo, so you don’t need to worry about mosaicking or stitching together multiple photos? This is all good if you just want a pretty picture. But if you would like to be able to make measurements or know the exact location of something, this isn’t a good option. This is because the further away something is from the centre of the photo, the more distorted it becomes (for more information on radial displacement, check out http://rscal.maitec.com.au/API/index.html). An orthomosaic corrects for this distortion by effectively using only the centre part of many overlapping photos.
Luckily there is another workaround (we’re up to number two now). You can actually tell the software to ignore ALL coordinates. It will then create an orthomosaic purely on determining photo overlaps – this gives a better result than having imprecise locations. BUT the output file will not have any geographic coordinates, that is, it won’t know where it is located on the surface of the earth.
Cue workaround number three – you now need to bring the orthomosaic into a GIS software package and georeference it according to another base data set.
So, technically yes, it is possible to use the Spark for mapping, but it’s really not that convenient! And I suspect that if you are buying the Spark as a beginner drone, then these workarounds may not be in your portfolio of skills :)
Perhaps you think that your area of interest (perhaps your school grounds) is small enough to fit within a single photo, so you don’t need to worry about mosaicking or stitching together multiple photos? This is all good if you just want a pretty picture. But if you would like to be able to make measurements or know the exact location of something, this isn’t a good option. This is because the further away something is from the centre of the photo, the more distorted it becomes (for more information on radial displacement, check out http://rscal.maitec.com.au/API/index.html). An orthomosaic corrects for this distortion by effectively using only the centre part of many overlapping photos.

Notice how the trees and building towards the edge of the picture appear to be leaning outwards. The top of the feature no longer aligns with the bottom. This is not an issue at the centre of the image. Radial displacement also increases with increasing height of a feature.
I want to make the point that I am not addressing camera quality here. I do believe that you get what you pay for, so the camera on the Spark is capable of capturing aerial imagery, but the quality is not as good as that of a more expensive option.
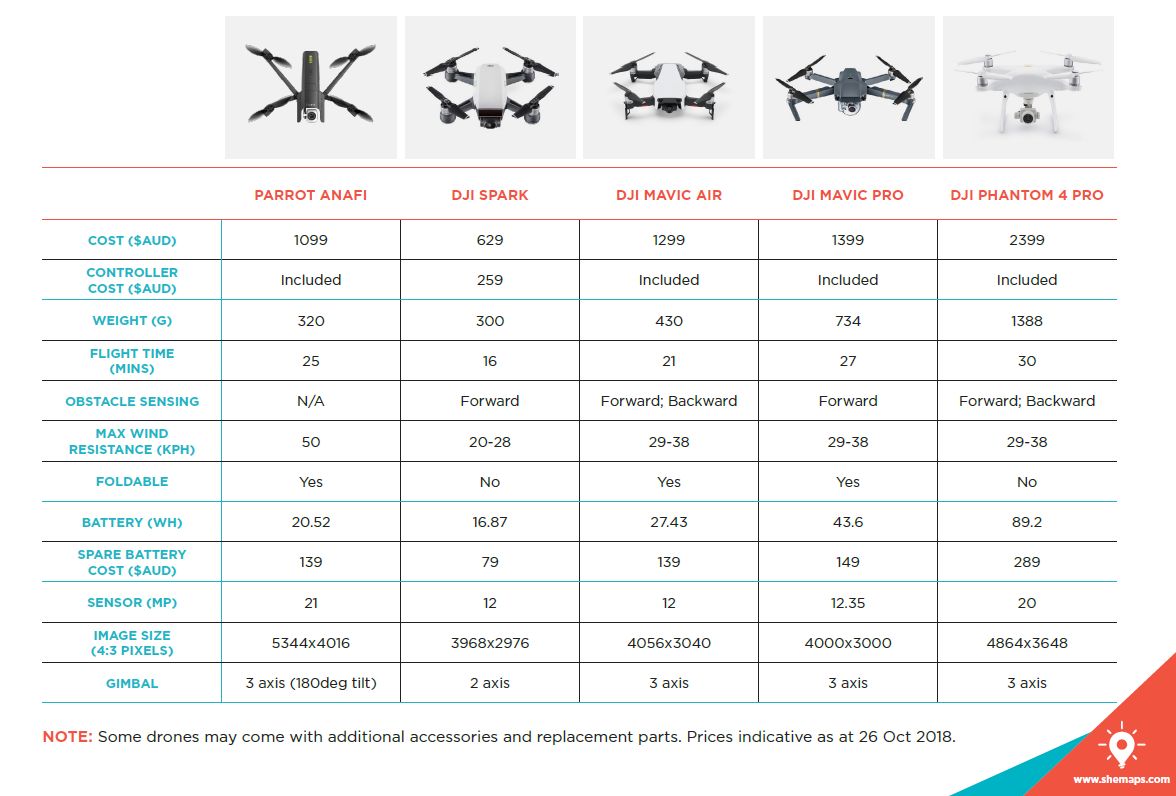
If the Spark is not for you, where to from here? I've compiled a list of a few of the other small (<2kg) drones that you might like to consider. Refer to their websites for a full cross comparison - I've only focused on the specifications that I deem to be most appropriate to mapping capabilities.
If the Spark is not for you, where to from here? I've compiled a list of a few of the other small (<2kg) drones that you might like to consider. Refer to their websites for a full cross comparison - I've only focused on the specifications that I deem to be most appropriate to mapping capabilities.
 RSS Feed
RSS Feed
