I'm not talking about sitting down with these guys, and and saying 'Hi Guys!' I totally don't have a problem with that.
Scenario 1. I'm in a group that another person addresses collectively as 'guys'. I point out that in fact I'm not a guy. The typical response goes something along the lines of 'haha, you know what I mean'. Yes, I do know what you mean...
Translation: What you mean is - the way that I want to address you is more important than the way you have asked to be addressed.
Scenario 2. While being shown a range of plants at my local nursery, the staff member refers to each new plant as 'this guy'. To be fair, there are some male and female plants, but that's not the point. I asked the staff member 'how do you know they are guys?' Again - 'haha, you know what I mean'. Yes, I do know what you mean.
Translation: What you mean is - the world is for and about men. Women are just a subset of the larger generic group.
So, I'm glad you brought up the idea of women being a subset. Let's look into that! If we just look at the English language (please don't shoot me down for the impact of colonisation here), it's clear that women is actually the more inclusive term, and men is the subset. This holds true for a number of related words: female, woman, she. See - male, man, and he are all subsets.
Translation: What you mean is - the way that I want to address you is more important than the way you have asked to be addressed.
Scenario 2. While being shown a range of plants at my local nursery, the staff member refers to each new plant as 'this guy'. To be fair, there are some male and female plants, but that's not the point. I asked the staff member 'how do you know they are guys?' Again - 'haha, you know what I mean'. Yes, I do know what you mean.
Translation: What you mean is - the world is for and about men. Women are just a subset of the larger generic group.
So, I'm glad you brought up the idea of women being a subset. Let's look into that! If we just look at the English language (please don't shoot me down for the impact of colonisation here), it's clear that women is actually the more inclusive term, and men is the subset. This holds true for a number of related words: female, woman, she. See - male, man, and he are all subsets.
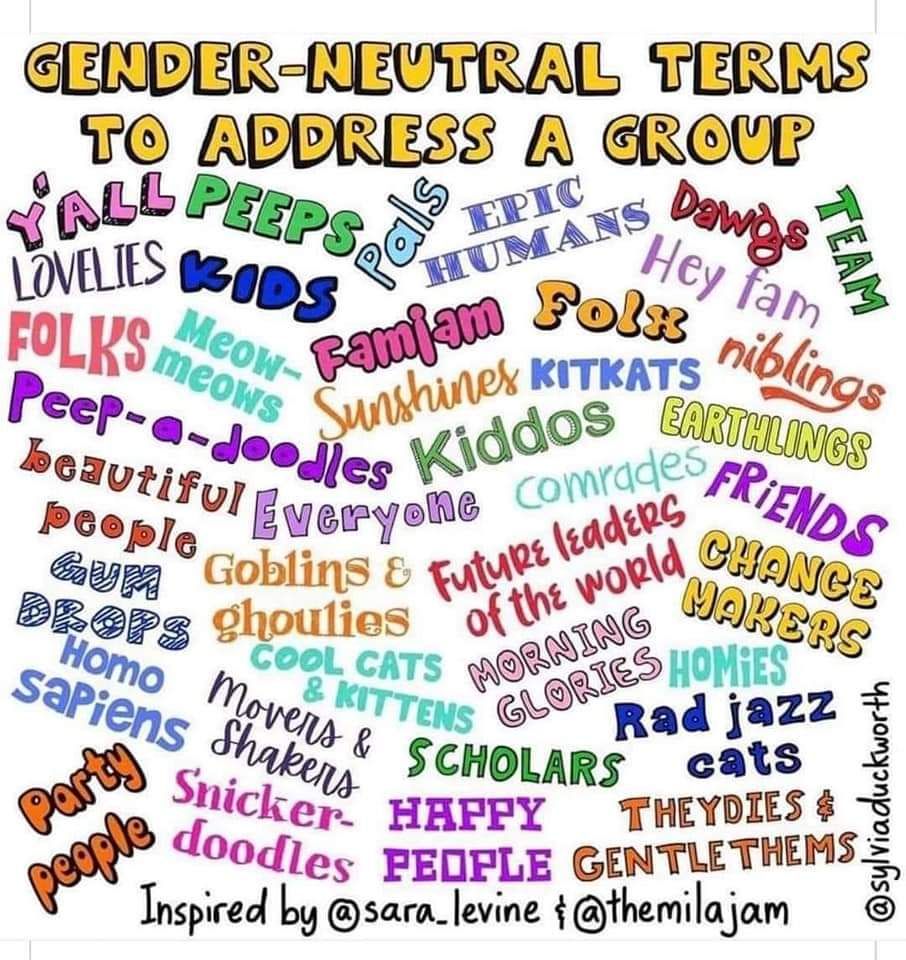
What are the alternatives to saying 'guys'?
I love the figure below by @Sylviaduckworth via Twitter for a number of cute alternatives to 'guys'. However I have to say that my number one favourite option is... nothing.
On most occasions where 'guys' is used to address a group of people, it's not necessary to use any word at all! It's redundant.
Try this - instead of saying 'hi guys', just say 'hi'.
Instead of saying 'alright guys, can I have your attention?', try 'alright, can I have your attention?'
Or instead of 'what are you guys up to?', how about 'what are you up to?'
On most occasions where 'guys' is used to address a group of people, it's not necessary to use any word at all! It's redundant.
Try this - instead of saying 'hi guys', just say 'hi'.
Instead of saying 'alright guys, can I have your attention?', try 'alright, can I have your attention?'
Or instead of 'what are you guys up to?', how about 'what are you up to?'
But hasn't culture made 'guys' gender neutral?
I challenge anyone to confidently and honestly say that when they close their eyes and imagine 'guys' that they equally imagine women and non-binary people as well as actual guys.
I also question why we as a society expect women and girls to not be offended by being called 'guys', yet also accept that to call boys and men 'girls' would be considered an insult or joke.
Perhaps you could try this for yourself. Next time you address a group of people that are not exclusively girls (i.e. including boys, men, and non-binary people), how about try saying 'hi girls!' Let me know how that goes down.
I also question why we as a society expect women and girls to not be offended by being called 'guys', yet also accept that to call boys and men 'girls' would be considered an insult or joke.
Perhaps you could try this for yourself. Next time you address a group of people that are not exclusively girls (i.e. including boys, men, and non-binary people), how about try saying 'hi girls!' Let me know how that goes down.















 RSS Feed
RSS Feed
